



j9九游会官网登录入口东风汽车:|女人POOPING大便A卫生巾|智能辅助驾驶的
发布时间:2026-04-28 08:47:12
2025年11月19日◈✿★ღ✿,在第五届汽车AI智能底盘大会上◈✿★ღ✿,东风汽车集团有限公司研发总院专家张国旺介绍到◈✿★ღ✿,线控底盘作为车辆的“四肢”◈✿★ღ✿,涵盖转向◈✿★ღ✿、制动与悬架等关键系统◈✿★ღ✿,具备高灵活性◈✿★ღ✿、冗余安全与快速响应等优势◈✿★ღ✿,例如线控转向支持多种手感反馈模式与低速静默功能◈✿★ღ✿,线控制动通过EMB系统实现毫秒级制动与精准扭矩分配◈✿★ღ✿,线控悬架则融合空气弹簧与阻尼控制以提升舒适性◈✿★ღ✿。
架构层面◈✿★ღ✿,东风天元智能架构整体为“一核双基双元”◈✿★ღ✿,依托中央域控与SOA服务化设计◈✿★ღ✿,推动底盘与智能辅助驾驶系统的跨域融合◈✿★ღ✿。该架构支持软硬解耦◈✿★ღ✿、多源感知数据整合与车云协同◈✿★ღ✿,实现了从感知决策到执行的端到端控制◈✿★ღ✿,有效提升了系统的响应速度◈✿★ღ✿、功能安全与持续进化能力◈✿★ღ✿。在此基础上◈✿★ღ✿,东风开发了爆胎稳行◈✿★ღ✿、紧急接管◈✿★ღ✿、预瞄防滑等一系列智能功能◈✿★ღ✿,不仅增强了行车安全与人机共驾体验◈✿★ღ✿,也为未来L3+级自动驾驶的实现奠定了扎实基础◈✿★ღ✿。

近期◈✿★ღ✿,GB17675 征求意见稿正式纳入线控转向系统◈✿★ღ✿,此举在法规层面为线控转向系统正式做了松绑◈✿★ღ✿。回顾转向系统的发展◈✿★ღ✿,从最初的机械式转向◈✿★ღ✿,到液压助力机械转向◈✿★ღ✿,再到电动助力转向◈✿★ღ✿,发展到如今到线控转向◈✿★ღ✿。在乘用车领域◈✿★ღ✿,转向系统在布置与控制方面日益呈现出更高的灵活性◈✿★ღ✿。
线控转向的手感反馈上◈✿★ღ✿,当前有四种发展形式◈✿★ღ✿,包括蜗轮蜗杆式◈✿★ღ✿、双蜗轮蜗杆式AI智能决策◈✿★ღ✿,◈✿★ღ✿、行星齿轮式和直连式◈✿★ღ✿。转向执行层面◈✿★ღ✿,当前转向部件通常沿用了电动助力转向系统的机构女人POOPING大便A卫生巾◈✿★ღ✿,后续仍有进一步简化的空间◈✿★ღ✿。对于前轮转向◈✿★ღ✿,可考虑取消当前不必要的小齿轮等结构◈✿★ღ✿,同时使传感器布置更为简洁◈✿★ღ✿。此外◈✿★ღ✿,还存在独立的轮边转向形式◈✿★ღ✿,该形式可实现内转或外转的控制模式◈✿★ღ✿,具备更高的安全性和可靠性◈✿★ღ✿,且带有冗余功能◈✿★ღ✿,操作更为灵活◈✿★ღ✿。
线控转向具备的新功能特性能够显著提升驾驶体验◈✿★ღ✿。一是设计低速灵活和高速稳定的转向传动比◈✿★ღ✿,可以管理传动比切换时机◈✿★ღ✿;二是在限位处产生阻力手感◈✿★ღ✿,避免机械撞击◈✿★ღ✿;三是模拟原地转向时的轮胎弹性手感◈✿★ღ✿;四是识别路沿等遇障工况◈✿★ღ✿,产生特殊阻力手感◈✿★ღ✿,避免电控系统过热◈✿★ღ✿;五是上电时先将方向盘与前转向机位置对齐◈✿★ღ✿;六是在APA等低速智能辅助驾驶工况下◈✿★ღ✿,方向盘静默不随动◈✿★ღ✿,提升舒适性◈✿★ღ✿。
目前◈✿★ღ✿,线及以上级别的辅助驾驶功能提供支持◈✿★ღ✿,在此过程中需引入冗余设计理念◈✿★ღ✿。再此介绍两种典型方案◈✿★ღ✿,一是IBC与RBU协同工作的冗余制动方案◈✿★ღ✿。该方案配备双控制器与双套执行系统◈✿★ღ✿,其中RBU可覆盖全部技术安全功能◈✿★ღ✿,作为安全保底机制◈✿★ღ✿,具备三级冗余制动模式◈✿★ღ✿。
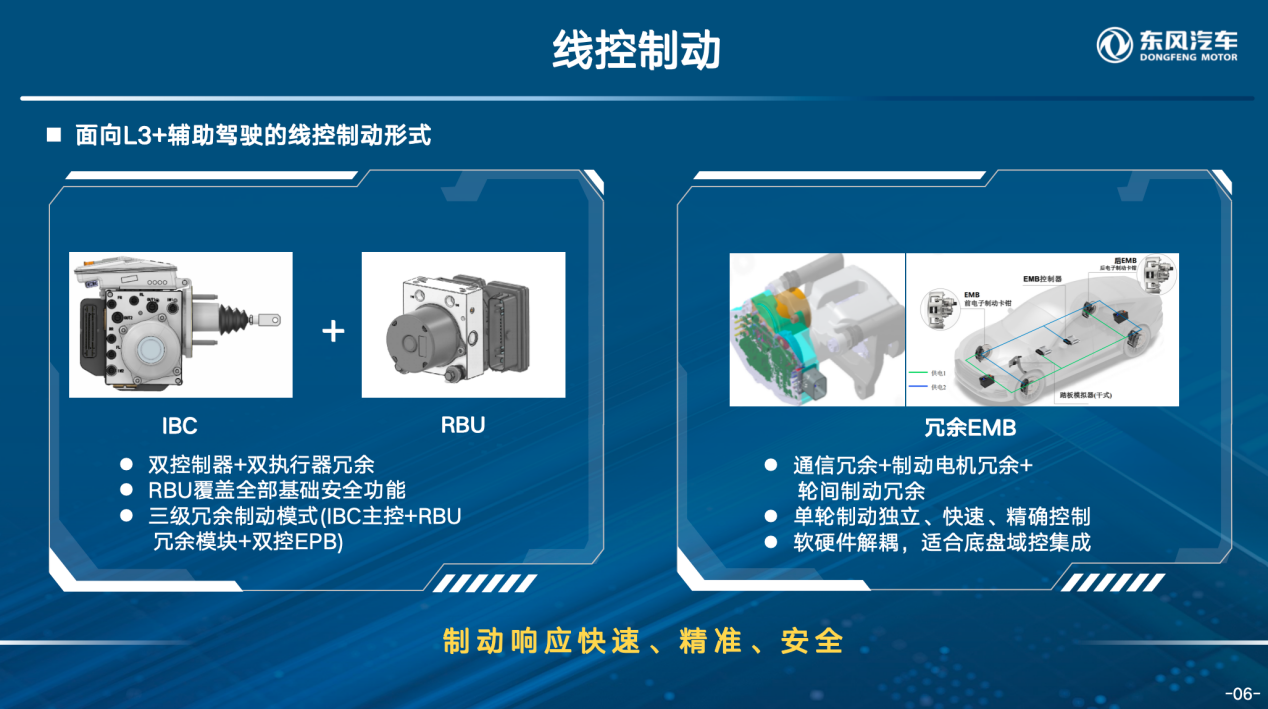
另一种是当前各企业正加速研发的冗余EMB◈✿★ღ✿。在EMB的指令器设计中◈✿★ღ✿,采用双绕组电机或双控制系统以构建冗余架构◈✿★ღ✿。该系统主要涵盖通信冗余j9九游会官网登录入口◈✿★ღ✿、制动电机冗余以及不同轮间制动冗余◈✿★ღ✿,例如◈✿★ღ✿,当某一车轮制动失效◈✿★ღ✿、丧失制动能力时◈✿★ღ✿,其他车轮可进行能力补足◈✿★ღ✿。EMB系统面临诸多算法难点◈✿★ღ✿,包括制动力分配◈✿★ღ✿、夹紧力控制◈✿★ღ✿、制动间隙调整和功能安全设计◈✿★ღ✿。
EMB对于提升整车性能具有诸多优势◈✿★ღ✿。一是EMB以电机直驱替代传统液压系统◈✿★ღ✿,可实现毫秒级响应◈✿★ღ✿,大幅缩短制动距离◈✿★ღ✿,提升制动精度j9九游会官网登录入口◈✿★ღ✿、能量回收效率以及主动安全性◈✿★ღ✿。例如◈✿★ღ✿,在制动分配方面◈✿★ღ✿,理论上可达成最优分配◈✿★ღ✿,进而提升车辆弯道通过性与制动舒适性◈✿★ღ✿;同时◈✿★ღ✿,凭借精确分配女人POOPING大便A卫生巾◈✿★ღ✿,能够降低如ESC等功能干预频次◈✿★ღ✿。
二是得益于电机直驱特性◈✿★ღ✿,相较于液压控制链路◈✿★ღ✿,EMB可实现精准扭矩控制◈✿★ღ✿,提升整车循迹能力◈✿★ღ✿,精准调控车辆横摆扭矩◈✿★ღ✿,为智能辅助驾驶系统提供增益◈✿★ღ✿。
三是具备四轮制动力同时独立可控的特性◈✿★ღ✿,能够增强车辆操纵稳定性◈✿★ღ✿,在低速泊车◈✿★ღ✿、狭窄道路行驶等场景下◈✿★ღ✿,可有效提高车辆通过性◈✿★ღ✿。
另外是垂直方向的线控技术◈✿★ღ✿,其核心构成主要包含两部分◈✿★ღ✿。其中一部分是空气弹簧的应用◈✿★ღ✿,当前众多中高端车型已广泛配备空气弹簧◈✿★ღ✿,且其形式多样◈✿★ღ✿,涵盖传统的单腔◈✿★ღ✿、双腔◈✿★ღ✿,甚至三腔空气弹簧◈✿★ღ✿。这类空气弹簧不仅能够调节车辆车架的高度◈✿★ღ✿,还具备变刚度等特性◈✿★ღ✿。

另外是变阻尼减震器◈✿★ღ✿,例如连续阻尼控制系统以及磁流变执行器◈✿★ღ✿。目前◈✿★ღ✿,磁流变执行器的成本正逐步降低居家办公趋势◈✿★ღ✿。◈✿★ღ✿。此外◈✿★ღ✿,全主动悬架具备按需调节能力j9九游会官方网站◈✿★ღ✿。◈✿★ღ✿,能极大提升车辆的舒适性◈✿★ღ✿。线控悬架可以实现俯仰控制◈✿★ღ✿、点头抑制◈✿★ღ✿、天棚控制等功能◈✿★ღ✿,并且支持用户自定义车辆的刚度和阻尼等参数◈✿★ღ✿。
线控悬架部分目前也呈现出一些创新发展方向◈✿★ღ✿。例如◈✿★ღ✿,在架构层面可对控制器进行整合收编◈✿★ღ✿,此举能够减少悬架系统控制器的数量◈✿★ღ✿,从而降低成本◈✿★ღ✿。整合后◈✿★ღ✿,垂向运动可与横纵向运动实现同步协调控制◈✿★ღ✿,充分发挥中央域控的优势◈✿★ღ✿。结合智能辅助驾驶技术◈✿★ღ✿,还可开展预瞄探测◈✿★ღ✿。对于配备供气系统的空气弹簧◈✿★ღ✿,还可开发便捷功能◈✿★ღ✿,如移动充气◈✿★ღ✿、舱内压力管理等◈✿★ღ✿。
当前各类新型线控技术◈✿★ღ✿、执行器以及底盘方案不断涌现◈✿★ღ✿,搭载车型也愈发丰富◈✿★ღ✿。预计到2026年◈✿★ღ✿,线控底盘技术将迎来量产落地的爆发期◈✿★ღ✿。线控底盘的发展为车辆控制提供了更多自由度◈✿★ღ✿,具备更为灵活精准的执行能力◈✿★ღ✿,能够显著提升车辆性能上限◈✿★ღ✿。同时◈✿★ღ✿,更多种类传感器的安装◈✿★ღ✿,可全面◈✿★ღ✿、精准地监测车辆行驶状态◈✿★ღ✿。若线控底盘性能的提升与下一代融合架构能够良好配合◈✿★ღ✿,将产生“1+12”的协同效应◈✿★ღ✿。
当前底盘架构有诸多创新◈✿★ღ✿。首先是功能层面的创新◈✿★ღ✿,即底盘与智能辅助驾驶系统的功能融合升级◈✿★ღ✿。其目的在于提升人工驾驶的舒适性◈✿★ღ✿、安全性与操控便捷性◈✿★ღ✿,同时使智能辅助驾驶功能更为高效敏捷◈✿★ღ✿,让驾驶员更加从容应对驾驶场景◈✿★ღ✿。
在早期发展阶段◈✿★ღ✿,主要涉及低阶辅助驾驶功能◈✿★ღ✿,如L1至L2级别◈✿★ღ✿。此阶段虽已实现部分辅助驾驶与底盘的融合◈✿★ღ✿,但采用的策略多为防御性◈✿★ღ✿,例如主动避让◈✿★ღ✿、主动刹停等功能◈✿★ღ✿。在该阶段◈✿★ღ✿,驾驶员虽能获得一定程度的智能辅助◈✿★ღ✿,但仍难以完全放心依赖◈✿★ღ✿。
2.0阶段◈✿★ღ✿,我们着力扩大感知融合功能的范畴◈✿★ღ✿,将智能底盘的横◈✿★ღ✿、纵◈✿★ღ✿、垂向控制优势与智能辅助驾驶系统相结合◈✿★ღ✿,使底盘的灵活控制能力为智能辅助驾驶所利用◈✿★ღ✿;同时j9九游会官网登录入口◈✿★ღ✿!◈✿★ღ✿,将智能辅助驾驶系统在视觉及其他传感方面的优势信息反馈给智能底盘◈✿★ღ✿,实现“行中有知◈✿★ღ✿、知中有行”◈✿★ღ✿。这种融合模式能够支撑L3+等更高级别的辅助驾驶功能◈✿★ღ✿,最终达成智能辅助驾驶与底盘完全融合的愿景◈✿★ღ✿,实现执行一体化的智能底盘与智能辅助驾驶系统端到端的控制◈✿★ღ✿。
当前我们也开展了许多课题预研内容◈✿★ღ✿,涵盖多个技术方向◈✿★ღ✿。一是多源异构融合感知技术◈✿★ღ✿;二是底盘-智能辅助驾驶的融合决策与协同控制技术◈✿★ღ✿;三是端云协同底盘具身智能体技术◈✿★ღ✿;四是新能源线控零部件产业化技术◈✿★ღ✿;五是虚实融合测试验证技术◈✿★ღ✿。
下图是底盘智驾融合控制的实现路径◈✿★ღ✿。以底盘与智能辅助驾驶的融合感知为例◈✿★ღ✿,可通过采集底盘数据以及智能辅助驾驶系统获取的各类数据◈✿★ღ✿,包括视觉◈✿★ღ✿、雷达数据等◈✿★ღ✿,实现多元数据采集◈✿★ღ✿,并将其融合构建为数据库◈✿★ღ✿。在此基础上◈✿★ღ✿,可以融入底盘特征信息◈✿★ღ✿,构建跨域融合预测模型◈✿★ღ✿,以此提升双方数据的丰富程度◈✿★ღ✿。

在人机共驾与智能辅助驾驶方向◈✿★ღ✿,可在基础数据采集过程中纳入驾驶员相关数据◈✿★ღ✿,例如神态◈✿★ღ✿、精神状态以及各类操作习惯等◈✿★ღ✿,据此建立车辆用户画像◈✿★ღ✿,实现意图建模与识别◈✿★ღ✿,并将相关信息输入控制算法◈✿★ღ✿,开展自适应干预控制管理◈✿★ღ✿。
此外◈✿★ღ✿,还需关注跨域系统的安全冗余设计◈✿★ღ✿。当前◈✿★ღ✿,为支持L3+级冗余◈✿★ღ✿,子系统多采用双子系统或多子系统冗余形式j9九游会官网登录入口◈✿★ღ✿。在此基础上◈✿★ღ✿,可进一步探索跨域冗余方案◈✿★ღ✿,例如利用制动系统为转向系统提供冗余◈✿★ღ✿。当智能辅助驾驶出现误判或需接管时◈✿★ღ✿,可启用底盘的最低限度备份功能◈✿★ღ✿,实现跨系统冗余◈✿★ღ✿。
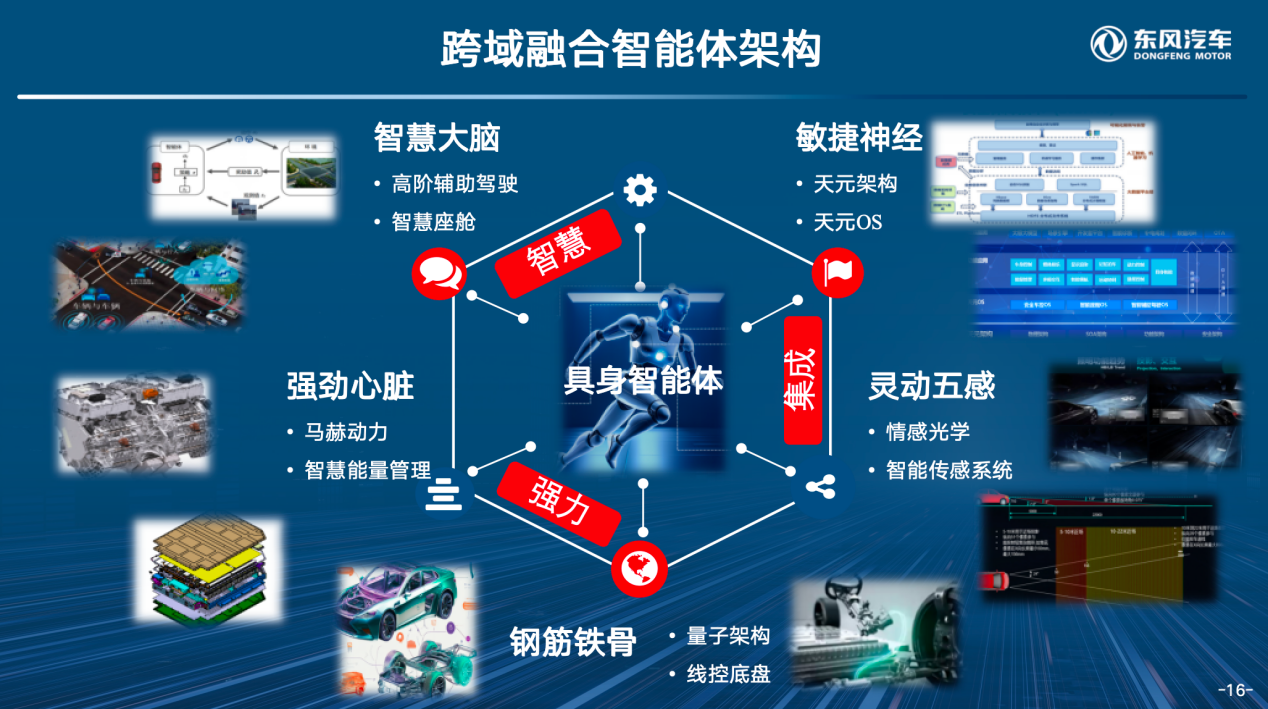
下图是东风汽车跨域融合智能体架构图◈✿★ღ✿,该架构涵盖多个关键技术领域◈✿★ღ✿。首先◈✿★ღ✿,架构中设有“智慧大脑”模块◈✿★ღ✿,包含高阶智能辅助驾驶系统与智慧座舱系统◈✿★ღ✿。同时◈✿★ღ✿,架构搭载车辆动力核心——东风自主研发的马赫动力系统◈✿★ღ✿,并配备智慧的能量管理系统女人POOPING大便A卫生巾◈✿★ღ✿。其次◈✿★ღ✿,线控底盘作为架构的“钢筋铁骨”◈✿★ღ✿,具备灵动无感的特性◈✿★ღ✿。架构还集成了各类智能传感器系统及其融合算法j9九游会真人◈✿★ღ✿。◈✿★ღ✿,同时通过车内情感光学技术为驾驶员提供增益体验◈✿★ღ✿。最后◈✿★ღ✿,架构的“敏捷神经”由天元架构与天元操作系统构成◈✿★ღ✿,二者作为连接各模块的神经触丝j9九游会官网登录入口◈✿★ღ✿,实现系统间的高效协同◈✿★ღ✿。
上述各类线控底盘及其融合功能◈✿★ღ✿,均需以优质的电子电气架构与软件架构作为支撑载体◈✿★ღ✿。下面分享一下东风汽车的天元智能架构◈✿★ღ✿。东风天元智能架构采用“一核双基双元”模式◈✿★ღ✿,其中核心为太极大模型◈✿★ღ✿,两大基础分别为天元电子电气架构和天元软件操作系统◈✿★ღ✿。目前◈✿★ღ✿,该架构已孵化出天元智能辅助驾驶和天元智舱两大品牌产品◈✿★ღ✿,后续还将推出天元线控功能等相关产品◈✿★ღ✿。该架构具备全域融合特性◈✿★ღ✿,可在全场景下实现赋能◈✿★ღ✿,并具备持续自主优化能力◈✿★ღ✿。
软件架构与电子电气架构领域◈✿★ღ✿,正呈现出中央域控的演进趋势九游会J9真人游戏第一品牌◈✿★ღ✿,◈✿★ღ✿,其发展方向为中央集中◈✿★ღ✿、软硬解耦◈✿★ღ✿、通信升级◈✿★ღ✿。从最早的1.0阶段◈✿★ღ✿,车辆仅具备简单的单网段◈✿★ღ✿,各功能模块相互独立◈✿★ღ✿;至2.0阶段◈✿★ღ✿,实现ECU的整合与集成◈✿★ღ✿,并对软件进行统筹管理女人POOPING大便A卫生巾◈✿★ღ✿,此阶段增加了更多网段与网关◈✿★ღ✿;进入3.0阶段◈✿★ღ✿,采用部分域控融合与集中的方式◈✿★ღ✿,设计面向功能◈✿★ღ✿,具备多网段特征◈✿★ღ✿,且除CAN线外◈✿★ღ✿,还引入了以太网◈✿★ღ✿;在当前的4.0架构中◈✿★ღ✿,采用高性能HPC搭配区域控制器的总分控制形式◈✿★ღ✿,运用面向服务的软件架构◈✿★ღ✿,构建软件生态◈✿★ღ✿,同时保留多网段特性九游会J9「中国」真人游戏第一品牌◈✿★ღ✿。该架构的优势在于可跨多个平台复用◈✿★ღ✿,具有低延迟◈✿★ღ✿、高带宽的特点◈✿★ღ✿,还能为高阶辅助驾驶提供冗余安全支持◈✿★ღ✿,在架构层面实现软硬件解耦◈✿★ღ✿,进而提升开发速度◈✿★ღ✿。
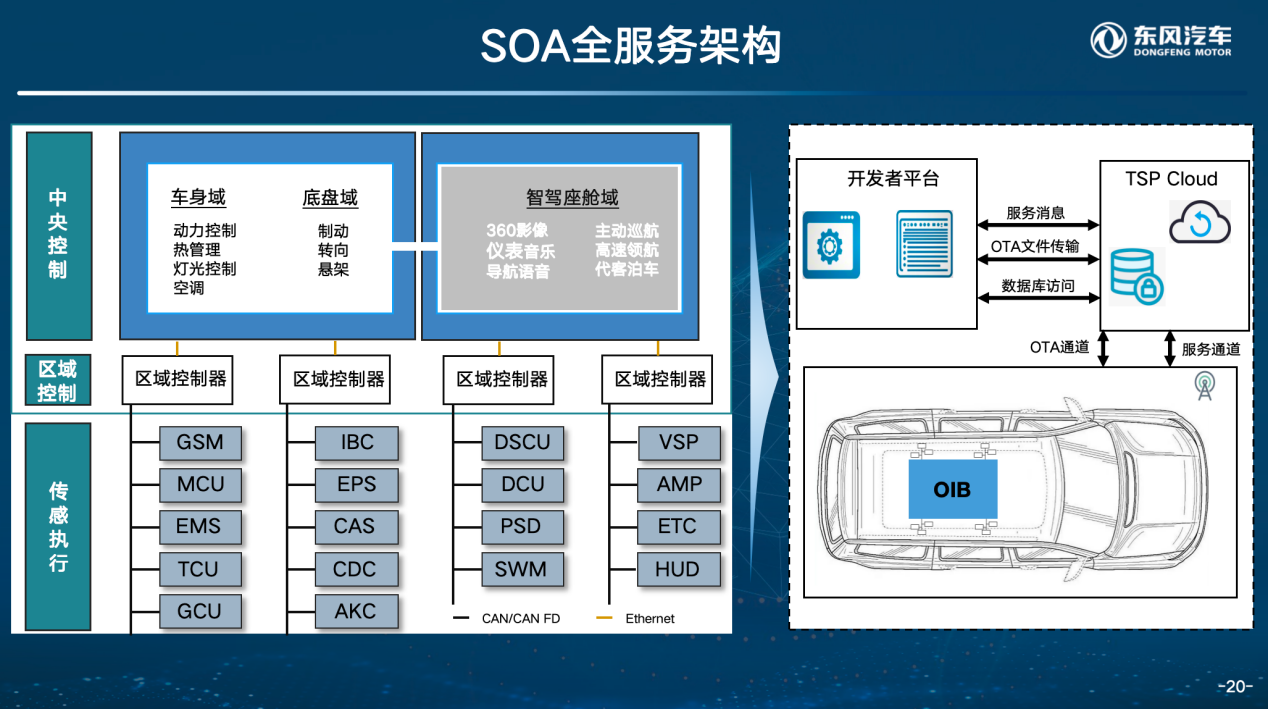
下图是SOA全服务架构◈✿★ღ✿。在中央控制层面◈✿★ღ✿,主要分为两大部分◈✿★ღ✿,一是智能辅助驾驶座舱域◈✿★ღ✿,二是车身域与底盘域◈✿★ღ✿。这两大域之下挂载了众多区域控制功能◈✿★ღ✿,涵盖网关以及各类底盘区域控制等◈✿★ღ✿。在这个架构上◈✿★ღ✿,可挂载多种服务功能◈✿★ღ✿,例如将制动◈✿★ღ✿、转向◈✿★ღ✿、悬架等分别构建为独立的服务◈✿★ღ✿,并依据优先级开展服务调度◈✿★ღ✿。此为单车架构◈✿★ღ✿。在车云协同方面◈✿★ღ✿,借助开发者平台◈✿★ღ✿,开发者能够开发所需的APP◈✿★ღ✿,并在TSP云上完成软件的安全验证与认证等流程◈✿★ღ✿。若通过认证◈✿★ღ✿,便可通过OTA通道对车辆进行云端软件更新◈✿★ღ✿,此方式有效提升了开发效率◈✿★ღ✿。
为实现上述架构◈✿★ღ✿,我们运用软件工程中的分层与模块化方法◈✿★ღ✿,统筹从L2至L3+的应用开发女人POOPING大便A卫生巾◈✿★ღ✿。发展方向是从感知加决策的两段式模型◈✿★ღ✿,逐步过渡到端到端的控制大模型◈✿★ღ✿,最终形成车路云一体化且具备多层冗余的L3+智能驾驶辅助平台◈✿★ღ✿。
早期◈✿★ღ✿,感知◈✿★ღ✿、规划与控制模块相互分立◈✿★ღ✿,基础软件层面的中间件和操作系统与硬件芯片紧密绑定◈✿★ღ✿,这属于传统车辆的零部件组织形式◈✿★ღ✿。进入下一阶段◈✿★ღ✿,采用两段式架构◈✿★ღ✿,中间件可借鉴AUTOSAR中实时运行环境的形式进行统筹管理◈✿★ღ✿。
在高阶智能辅助驾驶领域◈✿★ღ✿,一方面◈✿★ღ✿,通过顶层端到端的大模型统筹控制系统◈✿★ღ✿,并增设冗余执行系统以保障安全◈✿★ღ✿;另一方面女人POOPING大便A卫生巾◈✿★ღ✿,在底层软件部分◈✿★ღ✿,将中间件与操作系统进行标准化◈✿★ღ✿,提升平台性能◈✿★ღ✿。同时◈✿★ღ✿,硬件芯片与底盘驱动分别独立开发◈✿★ღ✿。
另外还有基于上述架构所做的整合◈✿★ღ✿,并行通信方案◈✿★ღ✿。该方案可使OTA速度提升80%◈✿★ღ✿。此外◈✿★ღ✿,从串行架构发展至并行架构后◈✿★ღ✿,我们能够依据各类器件的功率特性对网段进行分组◈✿★ღ✿,同时针对不同的系统进行分组更新◈✿★ღ✿,以适配不同的OTA形式◈✿★ღ✿。
这些新型架构与线控技术能够为智慧辅助驾驶提供更为可靠的安全保障◈✿★ღ✿。借助相关特性◈✿★ღ✿,可设计诸多新功能◈✿★ღ✿,以满足客户全场景行车的多样化需求◈✿★ღ✿。
在此过程中◈✿★ღ✿,我们发现客户两大痛点◈✿★ღ✿。一是在使用高阶驾驶辅助功能时◈✿★ღ✿,若车辆出现失稳情况◈✿★ღ✿,智能辅助驾驶系统难以对车辆进行稳定控制◈✿★ღ✿;二是当前底盘若未融合智能辅助驾驶的传感数据◈✿★ღ✿,其在行车风险预判及提前控制方面的能力较弱◈✿★ღ✿。例如◈✿★ღ✿,现有的ESC等控制功能◈✿★ღ✿,往往是在滑移发生后采取措施◈✿★ღ✿,属于事后补救◈✿★ღ✿。若能融入自动驾驶的感知与预判信息◈✿★ღ✿,或许可避免车辆进入这些危险的工况◈✿★ღ✿。
相关功能我们正在进行开发◈✿★ღ✿,部分已经发布◈✿★ღ✿。一是全域爆胎稳行功能◈✿★ღ✿。该功能涵盖智能辅助驾驶与人驾全场景◈✿★ღ✿、全车速下的保护模式◈✿★ღ✿,此功能旨在应对更广泛场景下的爆胎状况◈✿★ღ✿。
二是紧急接管辅助功能◈✿★ღ✿。此功能主要用于填补智能辅助驾驶退出至人驾接管过程中的空缺阶段◈✿★ღ✿,可实现毫秒级响应与监管◈✿★ღ✿,让驾驶员在使用L3 +辅助功能时更加安心◈✿★ღ✿。
三是主动预知防滑功能◈✿★ღ✿。在湿滑◈✿★ღ✿、雨雪等路况下◈✿★ღ✿,该功能能够防止车辆进入极限的ESC工况◈✿★ღ✿,提升行车安全性◈✿★ღ✿。
四是跨域故障冗余功能◈✿★ღ✿,包含两部分内容◈✿★ღ✿,一是转向◈✿★ღ✿、制动◈✿★ღ✿、驱动系统间的容错机制◈✿★ღ✿;二是冗余子系统的失效冗余控制算法◈✿★ღ✿,即针对失效情况的容错控制算法◈✿★ღ✿。
还有一些功能可提升行车舒适性与乐趣◈✿★ღ✿。例如预瞄全地形功能◈✿★ღ✿,该功能能够识别越野地形◈✿★ღ✿,并自动切换模式◈✿★ღ✿,降低越野门槛j9九游会官网登录入口◈✿★ღ✿,使越野经验不足的驾驶者也能享受越野乐趣◈✿★ღ✿。
另外是预瞄魔毯悬架◈✿★ღ✿,其具备更平滑◈✿★ღ✿、更高精度以及更优稳定性的特点◈✿★ღ✿,能为驾驶员带来更舒适的驾乘体验◈✿★ღ✿。它有别于现有的CDC控制女人POOPING大便A卫生巾◈✿★ღ✿,CDC需车辆碾压到颠簸路面后才能进行调整◈✿★ღ✿,而预瞄魔毯悬架可借助智能驾驶的感知能力◈✿★ღ✿,提前识别路况◈✿★ღ✿。
灵活转向服务则涵盖前后转向的协同配合◈✿★ღ✿,同时设有底盘健康管理系统◈✿★ღ✿,该系统利用云端数据◈✿★ღ✿,采集驾驶员及车辆的操作习惯与行为数据◈✿★ღ✿,通过大模型推演◈✿★ღ✿,能够为驾驶员提供车辆养护建议数字化办公◈✿★ღ✿,◈✿★ღ✿。
最后是对线控底盘领域的发展展望◈✿★ღ✿。首先◈✿★ღ✿,汽车执行器将朝着全面线控化与高可靠性方向发展◈✿★ღ✿,以此构建灵活的操控基础与极致的安全保障◈✿★ღ✿;其次◈✿★ღ✿,架构将向全面中央计算演进◈✿★ღ✿,实现硬件标准化◈✿★ღ✿、软件平台化◈✿★ღ✿;第三◈✿★ღ✿,底盘与智能辅助驾驶将实现跨域且深度的融合◈✿★ღ✿,并持续进行自进化◈✿★ღ✿。这一发展方向是从机械直连迈向灵活线控◈✿★ღ✿,从单体耦合过渡到分层结构◈✿★ღ✿,从区域孤立发展到跨域融合◈✿★ღ✿。
(以上内容来自东风汽车集团有限公司研发总院专家张国旺于2025年11月19日-20日在第五届汽车AI智能底盘大会发表的《智能辅助驾驶的“神经”与“四肢”◈✿★ღ✿:东风天元架构与线控系统的技术革新》主题演讲◈✿★ღ✿。)
上一篇 : J9九游会中国|优衣库百度云|三菱电机发布工业AI创新应用案例:小模型赋能精密制
下一篇 : j9九游会官方网站|姜可全文番外TXT百度免费笔趣阁|变形机翼多场耦合智能分析决
J9九游·(中国)真人游戏第一品牌 http://www.njjtxf.com